

This page will be dedicated to my 3D printer. I found out 3D printers while looking for CNC realizations and electronic stuff on internet. I finally decided to build my printer to make some small usefull parts (fastening parts, casings for electronics,...)
I discovered the delta printer and despite the complexity of mechanics (mechanical slack, mouvement control, ...) I decided to start building the rostock because I like the concept.
Because of lack of time to collect all components séparately or making them by myself, I decided to order a kit on ebay including : electronics (Ramp 1.4, arduino Mega, stepper controlers, control screen...) stepper motors and nozzle)
I also ordered the minimum printed parts to make a Rostock printer, ball bearings, power supply, ...
Here is the result after some improvements (bobbin support, auto bed leveling)




The bigger difficulties I faced to get a good print were linked to the bed leveling and adhesion of the first layer on that bed.
After a few attemp to tune the full printing surface bed level (very sensitive and to be done after each modification or
The more sustainable solution I found to solve the bed leveling issue is the auto bed leveling step before each print. I tried a home made switch without succes. the sensor was supposed to make a continuous contact by its own weight when it doesn't touch the surface. When the head of the sensor hits the surface, it breaks off the contact. That doesn't works because the weight of the sensor is too low to make a sufficient contact. I didn't wanted to add weight because it is recomended to keep the moving head of delta printer as light as possible (to reduce inertia)













 on peut attaquer : pose des renforts carbone et des tissus teintés
on peut attaquer : pose des renforts carbone et des tissus teintés



 pose des charnières en tissus d'arrachage :
pose des charnières en tissus d'arrachage : on éponge le surplus
on éponge le surplus pose du balsa
pose du balsa ensuite viennent les mèches de carbone qui constitueront les semelles du longeron
ensuite viennent les mèches de carbone qui constitueront les semelles du longeron voila le longeron posé, il faut bien écraser les mèches pour les aplatir
voila le longeron posé, il faut bien écraser les mèches pour les aplatir
 on éponge encore une fois avant de poser le tissus d'arrachage et de refermer le sac a vide
on éponge encore une fois avant de poser le tissus d'arrachage et de refermer le sac a vide bien insister sur le longeron pour extraire la résine
bien insister sur le longeron pour extraire la résine
 petite pause souper avant de faire l'autre demi
petite pause souper avant de faire l'autre demi

 retour en arrière : quelques photos de la teinte des tissus
retour en arrière : quelques photos de la teinte des tissus

 quelques photos de la fermeture :
quelques photos de la fermeture :













 le photographe de la soirée
le photographe de la soirée préparation pour la fermeture:
préparation pour la fermeture:















 beau boulot, et une masse correcte vu le layup
beau boulot, et une masse correcte vu le layup





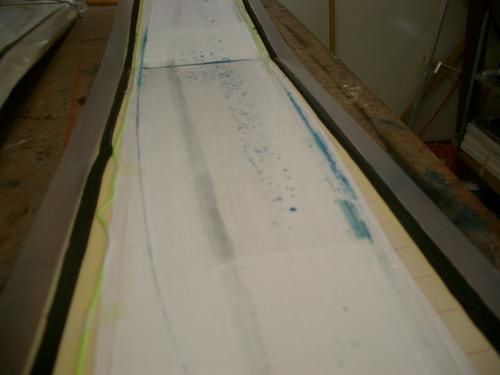

 voici après ouverture des sacs :
voici après ouverture des sacs : on voit la résine qui a imbibé le balsa au niveau de la charnière ( plus chargée en résine pour assurer le bon collage du tissus d'arrachage ) et du renfort carbone
on voit la résine qui a imbibé le balsa au niveau de la charnière ( plus chargée en résine pour assurer le bon collage du tissus d'arrachage ) et du renfort carbone
 16/10/08
16/10/08

 décaissage du balsa au dessus de l'axe d'articulation de l'aileron
décaissage du balsa au dessus de l'axe d'articulation de l'aileron
 avec un petit tourne vis
avec un petit tourne vis vérification de l'ajustement du longeron avec un peu de plasticine
vérification de l'ajustement du longeron avec un peu de plasticine préparation des "sub longerons" en chaussette carbone maintenues en forme grâce à un petit noyau en depron
préparation des "sub longerons" en chaussette carbone maintenues en forme grâce à un petit noyau en depron la check list ne pas oublier de se désaltérer !!
la check list ne pas oublier de se désaltérer !! avec parfois quelques effets secondaires
avec parfois quelques effets secondaires

 un peu de sérieux l'opération est cruciale
un peu de sérieux l'opération est cruciale imprégnation des chaussettes par le 6ème membre du groupe qui nous a rejoint en cours de route : Greg. dit Balsa ( champion belge f3k 08 )
imprégnation des chaussettes par le 6ème membre du groupe qui nous a rejoint en cours de route : Greg. dit Balsa ( champion belge f3k 08 ) la team a l'oeuvre
la team a l'oeuvre


 fermeture du moule; première remarque il faut faire le mélange résine micro-ballon moins épais
fermeture du moule; première remarque il faut faire le mélange résine micro-ballon moins épais la team au complet pour la fermeture de cette première aile
la team au complet pour la fermeture de cette première aile


 Ca y est, elle vole notre aile 0
Ca y est, elle vole notre aile 0
 Steevy qui a encore un peu mal au dos...
Steevy qui a encore un peu mal au dos...






 à droite Fred
à droite Fred


 démoulage
démoulage
 fixation du châssis
fixation du châssis
 1 semaine après on recommence, de nouveau jusque 2-3h du mat...
1 semaine après on recommence, de nouveau jusque 2-3h du mat...

 avant de réparer le plan de joint je n'ai pas résisté à mouler vite fait une pièce pour voir le résultat, il y a 2 couches de 80gr verre, je n'ai pas essayé de refermer le moule car mon but était de voir comment implanter le tube de queue. pour la photo les 2 demis tiennent avec du papier collant.
avant de réparer le plan de joint je n'ai pas résisté à mouler vite fait une pièce pour voir le résultat, il y a 2 couches de 80gr verre, je n'ai pas essayé de refermer le moule car mon but était de voir comment implanter le tube de queue. pour la photo les 2 demis tiennent avec du papier collant.


 -ensuite je remplis la cavité avec du gel coat ou dans ce cas ci de la résine ( plus fluide, donc s'infiltre mieux dans la cavité )
-ensuite je remplis la cavité avec du gel coat ou dans ce cas ci de la résine ( plus fluide, donc s'infiltre mieux dans la cavité )





 à suivre...
à suivre... 

 les commandes des empennages sont en cap de 0.4 pour la prof et 0.35 pour la dérive.
les commandes des empennages sont en cap de 0.4 pour la prof et 0.35 pour la dérive.

 le modèle a ce stade pèse 304gr il faut encore ajouter 4 gr dans l'aile pour compenser le peg
le modèle a ce stade pèse 304gr il faut encore ajouter 4 gr dans l'aile pour compenser le peg


 merci Balsa pour les photos.
merci Balsa pour les photos.



 et intrados:
et intrados: 


